Projets:Exofinger : Thumb
Description du projet
Aide à la pince de la main gauche en rapprochant le pouce du reste des doigts chez une personne qui peut mobiliser son pouce. Orthèse de pouce motorisé permettant la préhension d'un objet.
Cahier des charges
L'ExoFinger doit être facile à mettre, facile à enlever, ne pas gêner la mise en place du gant de propulsion de fauteuil de Bastien, être comfortable et permettre de réaliser les tâches suivantes :
- saisir une bouteille de 70cl placée sur une table pour la porter à la bouche
- saisir un sylo placé sur une table, attraper et signer un document placé à côté
- saisir un verre à pied placé sur une table et le porter à la bouche


Analyse de l'existant
https://www.youtube.com/watch?v=5GH4wtG1M2c&feature=emb_rel_end
https://www.youtube.com/watch?v=ecN4rNSgjPc
https://www.tendoforpeople.se/tendo
https://www.healtheuropa.eu/tendo-ab-this-is-the-first-exoskeleton-that-makes-sense/100961/
https://www.youtube.com/watch?v=AkdQW0MN_mw
https://drexel.edu/functional-fabrics/research/projects/exo-skin-soft-haptic-exoskeletal-interface/
https://www.frontiersin.org/articles/10.3389/fnins.2017.00597/full
https://hackaday.io/project/7174-neucuff-a-soft-orthotic-exoskeleton
https://www.thingiverse.com/thing:3910988
https://youtu.be/4vWE3Bn5seU?t=34
https://www.youtube.com/watch?v=TFTNlO2Ov7U
https://link.springer.com/article/10.1186/s12984-019-0633-6
https://www.thingiverse.com/thing:2799080
https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0193106#pone.0193106.s001
Equipe
Equipe Fabrikarium MHK/ArianeGroup octobre 2020
- Porteur du projet :
- Bastien Bignier, tétraplégie complète C6, ingénieur méthode ArianeGroup,
- Concepteurs/contributeurs :
- Roger Pissard, ingénieur de recherche, INRIA
- Christophe Braillon, ingénieur de recherche, INRIA
- Benoît Sijobert, fabmanager, Humanlab Saint Pierre
- Elvire Pastor, ergothérapeute, Humanlab Saint Pierre
- Jérome Choinard, ingénieur méthode, ArianeGroup
- Animateur (coordinateur du projet)
- Clément Trotobas, doctorant équipe CAMIN, INRIA Sofia Antipolis, étudiant ENS Rennes
- Nicolas Huchet, My Human Kit
- Fabmanager référent
- Nicolas Huchet, my Human Kit
- Responsable de documentation
- Elisa de Castro Guerra, Floss Manuals
- Contributeurs à distance :
- Christine Azevedo, directrice de recherche INRIA équipe CAMIN
- Laurence Boissieux, ingénieur de recherche, INRIA
Matériel nécessaire
Pour le gant :

- tissu 1m
- scrtachs
- un anneau de porte clef
- gaine de teflon
- ruban en satin ou morceau de tissu pour tenir les gaines
- fil de nylon (exemple fil de pêche) de 0,6 mm
- une machine à coudre
- nécessaire de couture
- stop-gaine en impression 3D
Outils nécessaires
Pour le gant :
- une machine à coudre
- nécessaire de couture (fil, ciseaux, aiguille...)
Fichiers source
Pour le prototype "poing américain", vous pouvez partir du STL
- Fichier STL pour impression de la partie main, solution "poing américain" : File:ExoFinger partie main.stl
- Fichier STL pour impression du doigtier, solution "poing américain" : File:ExoFinger doigtier.stl
Pour le gant
- Fichier de référence pour le patron File:FingerlessGlovePattern.pdf
- Le patron pour Bastien File:PatternGantBastien.pdf
Pour la carte nano arduino :
Délai estimé
Etapes de fabrication pas à pas
Prototype 1 : Traction de fil nylon caché par son gant grâce à ServoMoteur
Le résultat est un gant qui cache des cables en nylon afin de venir réaliser la pince en rapprochant le pouce de la main grâce à un moteur. La version 1 utilise un moteur assez volumineux. On notera que Bastien met en marche le moteur en appuyant sur un bouton pression de son autre main. Mais il est fonctionnel !


Confection du gant
Le gant sert à guider les fils de nylon pour rapprocher le pouce du reste des doigts. Le gant ne doit pas gêner le port des gants de propulsion. Il doit donc être réalisé sur mesure.
Découpe des morceaux patroné dans le tissu sélectionné. Il y a le gant, la partie du pouce et de la sangle pour tenir une boucle qui permettra d'insérer et de serrer le gant. Il y aura également des scratchs et du ruban en satin afin de fixer les gaines au gant. Les scratchs servent à fermer le gant sur la main de Bastien. Bastien parvient à s'aider de l'anneau pour enfiler le gant et fermer les scratch.

Pour la durabilité du gant, n'oubliez pas de surfiler le tissu. Ensuite la sangle a été cousue afin de placer l'anneau. Autour du pouce vous voyez en jaune les marges de couture pour positionner et coudre le pouce. Les scratchs ont été cousu dans un second temps. Le tracé jaune qui courre la paume est le placement de la gaine dans lequel sera inséré le fil de nylon.

Aparté sur la gaine de teflon
Nous n'avions pas de gaine suffisament petite pour accueillir les fils de nylon sous la main, mais nous avions des derailleurs de vélo. En effet il faut savoir que les derailleurs de vélo contiennent une gaine en teflon, très resistante et de taille idéale pour notre projet. Ce n'est pas une mince affaire pour les extraire. Il faut couper le plastique autour et tirer avec force pour séparer la gaine du derailleur de son plastique. Une partie de la gaine de teflon est abimée durant l'opération. Prélevez un morceau sain pour l'insérer dans le gant !

Durée de fabrication du prototype final
Nous avons réalisé ces deux prototypes en 3 jours comprenant la réflexion et les tests. Cependant vous pouvez compter 7heures de réalisation car la confection du gant sans patron est plutôt ardue. Nous avions déjà un patron des gants personnalisé utilisé par Bastien. Ce qui a facilité la confection du gant à 2 heures !
Prototype 2 : poing américain

L'objectif est de minaturiser encore le système du prototype 1.
Pour cela il faut pouvoir avoir un moteur plus petit, et comme sa course est plus petite, il s'agit de diminuer la longeur du nylon necessaire en rapprochant le moteur du pouce afin que la traction soit suffisante pour tenir un stylo et porter une bouteille. Il a été envisagé de positionner le moteur sur une bague. Le moteur a besoin de la longueur de trois bagues. D'où l'idée d'un système qui vient se positionner sur les dos des trois doigts tel un poing américain.
Les fichiers stl du support poing américain et de la bague de pouce :
- Fichier STL pour impression de la partie main, solution "poing américain" : File:ExoFinger partie main.stl
- Fichier STL pour impression du doigtier, solution "poing américain" : File:ExoFinger doigtier.stl
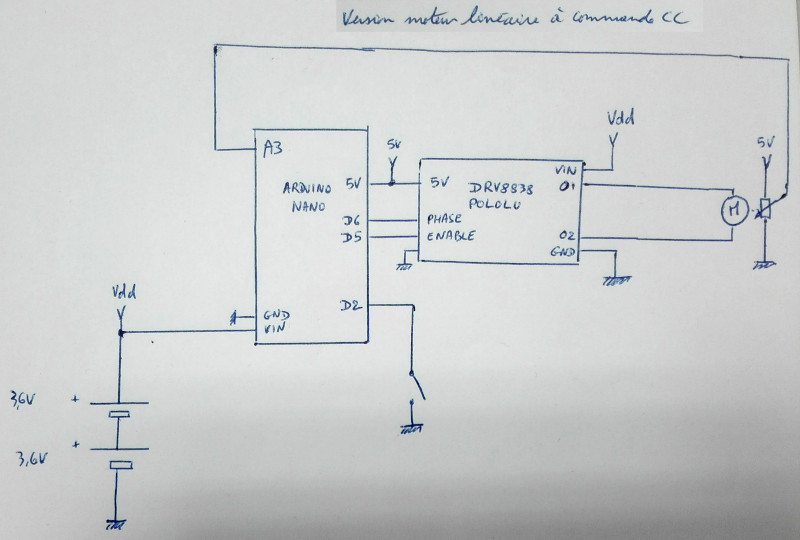
Schéma du montage :
Journal de bord
Objectif est d'aider à la pince en rapprochant le pouce des autres doigts de la main.

Prototype 1 :
Placer un fil de nylon afin de rapprocher le pouce de la main en positionnant le fil le long du pouce et qui courre jusqu'au poignée.

Prototype 2 :
Faire courrir le fil de nylon sur le dos de la main afin de dégager le poignée. Car Bastien utilise des gants de protection pour se déplacer en fauteuil.

Les prototypes 1 & 2 nécessitent de fixer les cables à la main. La solution d'un gant a été envisagé afin de coudre des passages de gaines afin de pouvoir y glisser les cables de nylon.
Réalisation du gant
Bastien utilise des gants pour l'aider à propulser son fauteuil. Cela a donné l'idée de concevoir un gant personnalisé afin de pouvoir y coudre des gaines afin de diriger les fils de nylon.
Un gant a été déjà réalisé et basé sur celui-ci un patron a été fait puis a servi de découpe pour notre gant support de gaines.

Et avec le tracé des gaines qui ont été le plus efficace et le gant modifié :

Des tests ont été réalisé sur Bastien avec mise en place du gant et insertion des fils de nylon dans les gaines, et voici donc le schéma mis-à-jours avec le chemin des fils.

Durant le premier test, Bastien a inséré le gant seul, et les fils de nylon ont été actionné manuellement. Le pouce a bien été rapproché de la main, Bastien avait bien une pince. Cependant, la gaine de téflon est également attiré par la pression exercé. Il a donc été proposé comme solution de bloquer la sortie de la gaine en réalisant un stop-gaine à coudre sur le gant en bordure.
Création d'une pièce pour stopper la gaine et laisser passer le nylon.

Ensuite il faut coudre le stop-gaine sur le gant.

Etape suivante : le servo moteur
Un test à été réalisé par un membre de l'équipe, où le fil qui sors du gant a été connecté à un servo moteur afin de tester l'efficacité de la force du moteur.
Il apparaît que la force nécessaire doit être beaucoup plus forte que prévue car tout s'étire : le moteur posé sur la peau a tendance à ramener la peau, le fil s'étend, les noeuds s'étirent, bref il y a une perte énorme de poussée.
Conclusion : il faut poser le moteur qui tirent les fils, non pas sur la peau ou un dispositif accroché à la peau mais sur un support plus rigide et peut être associé au gant afin de prévenir cet étirement naturel.
Prototype 3 : Poing américain
Cette proposition tente de modifier le trajet du nylon afin de diminuer la force du servo moteur pour la préhension finale d'un stylo.



Nous avions sous la main une main bionique dans laquelle nous avons prélevé des moteurs :

Prototype 4
Recherche autour d'une solution qui propose non pas de tirer, mais de pousser le pouce grâce à l'aide d'un fil rigide.
Devant le succès des prototypes suivant et de leur amélioration, cette piste n'a pas été étudié. Peut-être avez-vous envie d'y explorer les possibilités de votre côté ?

Programmation servo moteur


Les montages réunissant batterie, moteur et carte testées sont ci-dessous. La version miniaturisée sera pour une version plus légère dans le cadre de premier essai réussi.


Schémas electronique des différentes cartes avec les moteurs et la batterie.


Code électronique de la carte controlant le servo moteur (modifier le .txt en .ino). Fichier:Thumb.txt