Différences entre versions de « Projets:Orthèse de Coude Robotisée »
Sauter à la navigation
Sauter à la recherche

(Created page with "right|400px == Description du projet == Pour Emilie & Anouck, deux enfants ayant un coude non fonctionnel, concevoir une orthèse de coude robotis...") |
|||
| Ligne 45 : | Ligne 45 : | ||
[[Category:Projets]] | [[Category:Projets]] | ||
[[Category:Concept]] | [[Category:Concept]] | ||
| − | [[Category: | + | [[Category:Motricité]] |
| + | [[Category:Membre supérieur]] | ||
[[Category:Humanlab_SP]] | [[Category:Humanlab_SP]] | ||
Version du 6 juillet 2021 à 16:51

Description du projet
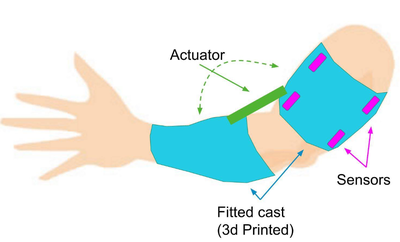
Pour Emilie & Anouck, deux enfants ayant un coude non fonctionnel, concevoir une orthèse de coude robotisée (motorisée) pour remobiliser leur bras.
Cahier des charges
- Léger
- Capable de lever un avant bras d’une enfant de 10 ans
- Low-cost
Analyse de l'existant
- Appareillage classique, orthèse thermoformée non motorisée avec verrouillage par cliquet
- Projet “Assistive Robotic Arm” open-source : https://sites.google.com/site/ourkidscandoanything/build-your-own
Equipe (Porteur de projet et contributeurs)
Humanlab
Matériel nécessaire
- Servomoteur linéaire : commande type RC, couples et longueurs variables, ex: https://www.robotshop.com/eu/fr/actuateur-lineaire-miniature-actuonix-l12-6v-100mm-1001-analogique-firgelli-technologies.html?utm_source=google&utm_medium=surfaces&utm_campaign=surfaces_across_google_eufr&gclid=EAIaIQobChMIytmL2JG76wIVxLHtCh3scQIfEAYYASABEgJjyvD_BwE
- Arduino
- Capteurs pour commande : soit capteur myoélectrique, soit capteur flexion
Outils nécessaires
- Imprimante 3D
- Fer à souder
Coût
Environ 150€
Fichiers source
