Différences entre versions de « Projets:Trotti wheel »
Sauter à la navigation
Sauter à la recherche



| Ligne 35 : | Ligne 35 : | ||
[[File:BALa0ZVr o.jpg|350px]] [[File:QI4Jvynz o.jpg|350px]] | [[File:BALa0ZVr o.jpg|350px]] [[File:QI4Jvynz o.jpg|350px]] | ||
| − | |||
| − | |||
| − | |||
<br clear=all> | <br clear=all> | ||
| Ligne 45 : | Ligne 42 : | ||
| − | [[File:YLaFF5AM o.jpg | + | [[File:YLaFF5AM o.jpg|350px]] [[File:BNy8yi8P o.jpg|350px]] |
| − | |||
| − | [[File:BNy8yi8P o.jpg | ||
| + | <br clear=all> | ||
| − | |||
Souder les fils d'alimentation à la carte en mettant d'abord de l'étain sur les bornes + et - puis en venant placer les fils directement dessus. | Souder les fils d'alimentation à la carte en mettant d'abord de l'étain sur les bornes + et - puis en venant placer les fils directement dessus. | ||
| − | [[File:P2jZXvcJ o.jpg | + | [[File:P2jZXvcJ o.jpg|300px]] [[File:Wr20V0Ep o.jpg|300px]] [[File:Z319LbTM o.jpg|300px]] |
| − | |||
| − | [[File:Wr20V0Ep o.jpg | ||
| − | |||
| − | [[File:Z319LbTM o.jpg | ||
<br clear=all> | <br clear=all> | ||
Version du 12 septembre 2018 à 15:16
Description du projet
Cahier des charges
Analyse de l'existant
Equipe
Matériel nécessaire
Outils nécessaires
Coût
Electronique
Schema général
Le prototype se compose:
- d'une batterie Lithium Polymere (LiPo)
- d'un contrôleur electronique (ESC)
- d'un module radio/wifi permettant de controler le moteur à distance (radiocommande)
- d'un module de gestion de la puissance/vitesse (un simple potentiometre)
- d'un moteur brushless
- d'un gestionnaire de charge pour les batteries (BMS)
.. image:: ./assets/FW_02_wiring.jpg
Câblage
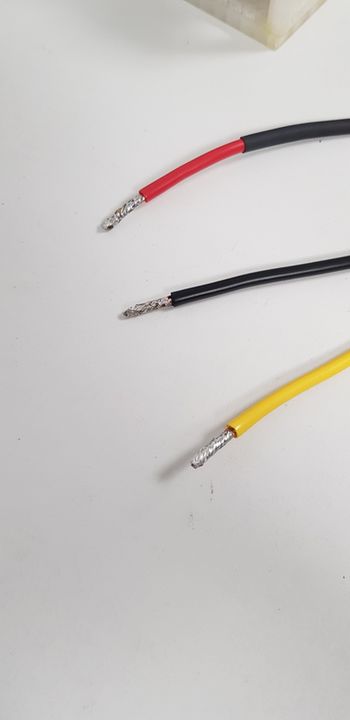
Etamer les fils d'alimentation puis recouper de façon à ce que les fils dénudés ne soient pas trop longs.


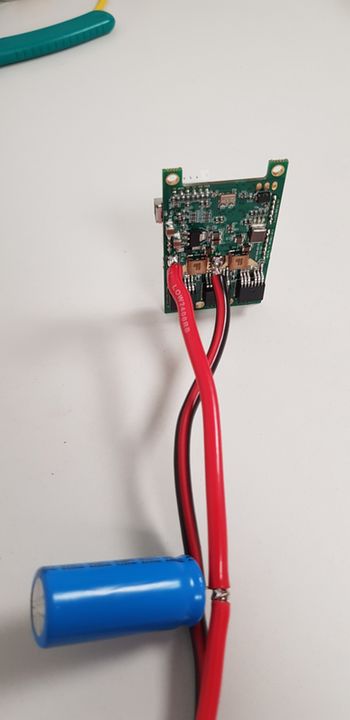
Enrouler les pattes du condensateur puis les souder. Vérifier avec un multimètre la continuité du courant.


Souder les fils d'alimentation à la carte en mettant d'abord de l'étain sur les bornes + et - puis en venant placer les fils directement dessus.



Etamer les deux autres extrémités des fils.
Photos finales


Ensuite, étamer les trois bouts sur la carte puis les deux extrémités des câbles qui vont alimenter les trois bobines électromagnétiques du moteur (câbles triphasés).


Les souder à plat sur les trois bouts préalablement étamés de la carte.
