Différences entre versions de « Projets:Bionicohand »
| Ligne 266 : | Ligne 266 : | ||
Cette cinématique est un outils de préparation à l'intégration des nouvelles pièces, elle permet d'ajuster la taille et l'emplacement des pièces pour installer le nouveau système. | Cette cinématique est un outils de préparation à l'intégration des nouvelles pièces, elle permet d'ajuster la taille et l'emplacement des pièces pour installer le nouveau système. | ||
| − | |||
| − | |||
| − | |||
Version du 9 novembre 2021 à 12:31

Description du projet
Bionicohand : prothèse d'avant-bras commandée par des capteurs musculaires.
Une prothèse de main myoélctrique à prix abordable et à réparer soi-même.
Une myohand (prothèse myoéléctrique) est destinée aux personnes amputés du membre supérieur afin de retrouver une autonomie au quotidien (vie sociale, professionnelle, transport etc.), bien que très utile, leurs fonctions restent toutefois limitées (pince en opposition).
En France, certaines prothèses sont remboursées par la sécurité sociale. L’amélioration des technologies a fait apparaître des prothèses permettant plus de possibilités de mouvements (pince latérale, crochet, index etc.) et une meilleure esthétique. Ces prothèses poly-digitales ne sont pas remboursées et coûtent « un bras », de 30 000 à 70 000 euros.
Le projet a pour but de fédérer une équipe autour de la construction d’une prothèse du membre supérieur à bas coûts, en utilisant des pièces standardisées et open source, facilement réparable et donc accessibles aux personnes à faibles ressources financières. Ce projet ne vient pas concurrencer les fabricants de prothèses destinées aux pays à couvertures sociales ou aux personnes à situations financières confortables. Il souhaite apporter une aide aux pays émergents n’ayant pas l’accessibilité à l’appareillage prothétique. Le projet comporte diverses motivations : la passion envers la technologie, le partage des savoirs ; le désir d’aider les autres et un mécontentement du monde dans lequel nous vivons aujourd’hui.

Emboiture
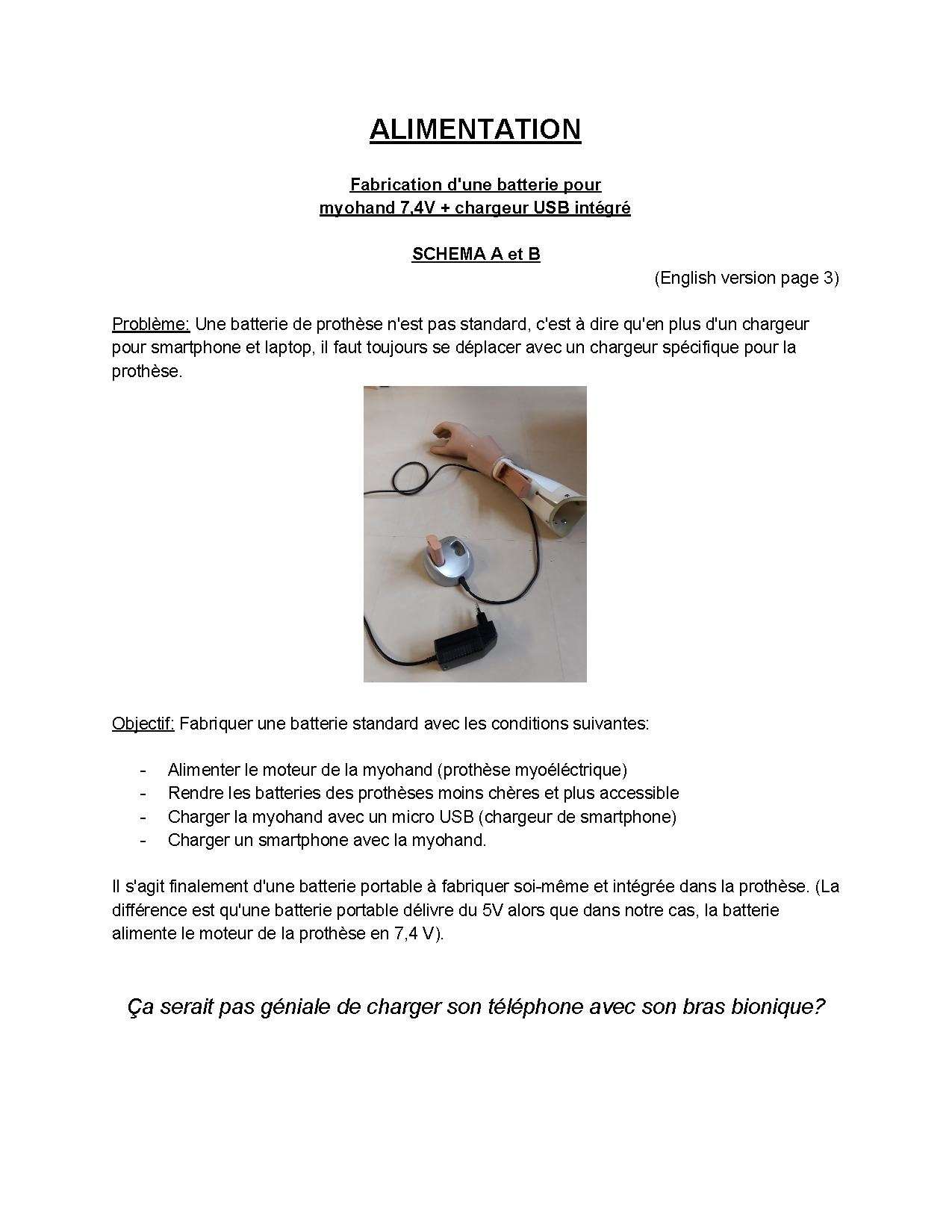
Alimentation
Objectifs
Inventer un système d'alimentation électrique discret, fiable, abordable et sans danger pour le bon fonctionnement de la prothèse myoélectrique.
- Contraintes :
- 7.4V, 1000mAh min, pic de 2A
- Recharge par câble usb (Ex : micro-usb, usb-C, apple...)
- Composants standards (ex: accumulateurs 18650) et de préférence discrets (ex : accumulateurs 14500)
- Interrupteur pour éteindre et allumer la prothèse instantanément (pas de temporisation à la mise hors/sous tension)
- Indicateur visuel de décharge
- Dispositif sécuriser et sécurisant (dissipation thermique des composants, gestion des éléments de la batterie)
- Le système d'alimentation comporte les éléments suivants:
- Batterie : Alimente la main électrique et les électrodes
- BMS (Batery Management System) : Gère la charge/décharge de la batterie et protège contre les courts circuits
- Convertisseur DC/DC : Assure la stabilité du voltage
- Interrupteur ON/OFF : Coupe l’alimentation de la main permettant de maintenir un objet serré sans contraction
- USB in : Port de recharge de la batterie (micro USB, USB-C...)

Choix du moteur DC
Ce modèle à été sélectionné pour sa compacité et ses performances. D'après la documentation technique du micromoteur à courant continu sa tension nominale est de 6V mais sera utilisé à 7,4V, il est donné pour 1,6A.
Choix des batteries

- Lithium Ion 18650
- + moins fragile/sensible que lipo
- - taille importante

- Lithium Polymère
- -danger si batterie percée
- + gain de place
Choix du convertisseur DC/DC
Objectifs :
Déterminer le matériel capable de maintenir une tension stable en sortie en fonction du taux de charge de la batterie.
La charge du moteur sera simulée par une résistance de 250W de valeur :
- 5 Ohm pour le fonctionnement en charge du moteur
- 10 Ohm pour le fonctionnement nominale du moteur
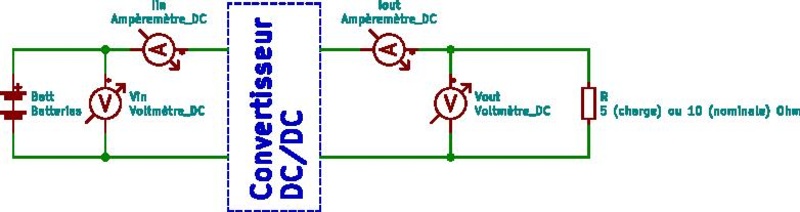
Ce circuit permet de déterminer les caractéristiques "réel" du convertisseur pour déterminer sa fiabilité dans des conditions extrêmes : batterie faible, charge moteur élevée et charge nominale.
On mesure alors les tensions et courants d'entrée Vin / Iin et de sortie Vout / Iout
La températures des composants est déterminé grâce à une caméra thermique.

Test des convertisseurs DC/DC
MT3608 et XL4005E1
MT3608 : tension d'entrée 2-24V, tension de sortie 5-28V, max 2A

carte XL4005E1 : tension d'entrée 5-32V, tension de sortie 0.8V-30V, 5A nominal, max 8A.

Tableau de mesures

Conclusion :
La carte MT3608 ne tient plus ses spécifications lorsque l'on dépasse 1A.
Elle n'a donc pas les caractéristiques nécessaires pour alimenter le moteur dans les conditions envisagées.
La carte XL4005E1 est surdimensionnée (5A) mais elle génère une tension de sortie plus stable et propre. Par contre elle ne fonctionne qu'en abaisseur de tension à partir de 5V donc nécessite 2 batteries de 3,7V. soit 8,4V ce qui ne gène en rien l'usage que l'on souhaite en faire.
Choix du chargeur de batterie
Objectifs :
Le chargeur ou BMS doit pouvoir gérer la charge et la décharge des batteries tout en assurant la protection (décharge profonde, échauffement) de celle-ci.
L'acronyme BMS signifie Battery Management System.
Test de chargeurs de batterie
Modèle HX-2S-JH20 10A
- - Demande une tension d'entrée élevée (8,4-9V) ce qui nécessite un convertisseur afin d'élevé la tension de deux batteries (3,7x2=7,4V)
- - Gestion complexe des entrées/sorties en fonction de la charge ou décharge de la batterie : ce sont physiquement les mêmes broche du circuit

Modèle à base de TP4056
- Ce modèle permet de chargé une seule batterie

infos sur le chargeur de batterie TP4056
- Mise en parallèle des deux modules TP4056
- Pour charger deux batteries il est nécessaire d'utiliser deux modules

- Problème
- La mise en parallèle de deux circuits de chargeTP4056 pose un problème d'isolation électrique entre les deux circuits.
- En effet le fait de disposer d'une seule alimentation 5V commune pour les deux modules créer un court circuit au niveau du second circuit. Le OUT+2 est connecté au OUT-1 qui est lui même relié au -5V. De ce fait la borne OUT-2 se retrouve au même potentiel que la borne OUT+2 et créer un court-circuit franc.
- Solutions 1
- La solution la plus simple à mettre en place consiste à intégrer un double interrupteur N0/NC qui permet de mettre en parallèle le 5V pendant la charge et isoler les deux batteries. Pendant l'utilisation l'inter 1 sera ouvert et l'inter 2 sera fermé, ce qui nous permet de mettre en série les deux batteries et isoler les deux entrées 5V.

- Solution 2
- La seconde solution consiste à utiliser deux convertisseur DC/DC 5V vers 5V pour isoler galvaniquement l'entrée des deux circuits.

Test indicateur de charge à led
- Modèle HW-798A
- Il comporte 4 leds
- De base, il est calibré pour indiquer le niveau de batterie de 1 cellule (entre 3 et 4 V environ). Il faut souder le jumper J1 pour passer à un niveau de batterie de 2 cellules (première led à 6.6V et dernière led à 7.9V)

Lien pour se procurer la carte HW-798A-4 sur alibaba
Connexion des différents éléments
Il s'agit de connecter les différents modules : batterie, carte de charge/protection, convertisseur DC/DC, indicateur de charge, interrupteur.
Cet assemblage comprend deux convertisseurs MT3608 (ne pouvant gérer qu'un ampère) montés en parallèle afin de gérer les 1,6A nécessaire au fonctionnement du moteur.
Pour le test nous avons connecter une pince munie de moteur.


schéma au format pdf
Étude d'intégration du matériel dans l’emboîture
- Objectifs
- Intégrer le matériel nécessaire à l'alimentation du moteur en fonction des composants choisis et des contraintes d'usage




Cet exemple comprends les modules sélectionnés plus haut, ces cartes sont disponibles dans le commerce et ne sont pas forcément adaptés en dimensions. Tout comme les connections entre les modules ne sont pas tout à fait en accord avec le cahier des charges. Il sera sans doute préférable de développer un circuit permettant de prendre en compte les contraintes d'espace et la dissipation thermique nécessaire aux différents composants.
Les fichiers originaux se trouvent ici, ils ont été créer avec le logiciel catia mais contient aussi le fichier au format .stp.
Sources/Références
- Moteur à tester pour le système de batterie : (tension nominale 6V) :
https://www.faulhaber.com/fileadmin/Import/Media/FR_2224_SR_DFF.pdf
- Logiciel open source pour visualiser / modifier les fichiers STEP
https://www.freecadweb.org/downloads.php
- Logiciel open source pour créer des schémas électroniques et des pcb
https://www.kicad.org/download/
Capteur
Poignet
Motorisation
Électronique
Gants
Mécanique
- Objectifs
- Créer un mécanisme d’abduction du pouce (mouvement permettant de le positionner en position latérale ou opposée) motorisé (sans intervention manuelle avec la main opposée).

Cahier des charges
Suite aux différents prototypes testés le cahier des charges à évolué
Contraintes :
- fragilité des pièces imprimées
- problématiques de coûts (abordable)
- réparabilité
- partage des plans qui évite délais d’approvisionnement
- ethétique : donner envie à une personne de porter une prothèse
Comparer différents moyens de fabrications
- impressions materiaux fibrés carbone, métal
- usinage (+ de fraiseuses que d'imprimantes 3D disponibles) permet de créer des pièces de rechanges via réseaux de lieux où réparation est possible
Modification du mécanisme développé par MHK et Orthopus
Visualisation du système mécanique bielle rotule originale et fichier.STEP original myhohand
- Ce modèle permet le déplacement du pouce à l'aide de l'autre main et non de manière automatique


Création d'une cinématique : Modélisation
Afin d'imaginer les solutions techniques possibles, un système a bielle à été créer pour que les liaisons nécessaires aux différents mouvements soient possibles.
Cette cinématique est un outils de préparation à l'intégration des nouvelles pièces, elle permet d'ajuster la taille et l'emplacement des pièces pour installer le nouveau système.
- Modification du support supérieur du pivot pouce
- Le support à été modifier pour autorisé les différents mouvement de pivot du pouce.

- Ajout d'une poulie pour simuler la motorisation
- Pour ce prototype le mouvement sera générer manuellement et non pas par un moteur.

Créations de pièces mécaniques
- Pivot Pouce
- La pièce en jaune forme fera pivoter le pouce via une liaison avec le disque couplé au moteur.


- Motorisation du majeure par bielle
- L'entraînement du majeure sera effectué par une bielle accouplé au disque couplé au moteur.

Mise en œuvre : Impression 3D
Petit aperçus de l'évolution des pièces du prototype imprimés en 3D








Les fichiers STL se trouvent ici et les fichiers originaux créés sous solidworks là
Références/ Sources
Quelques modèles de prothèses commerciales :
- Ottobock a également breveté une version de la prothèse Michelangelo avec un seul moteur
(deux dans le version originale), afin de proposer une version plus fine :
https://patents.google.com/patent/DE102018100173A1/de
- SSSA My Hand :
https://www.youtube.com/watch?v=fH2MVtCMwGg
Entreprises potentiellement intéressantes :
- Schunk, entreprise allemande spécialisé système de préhension
https://schunk.com/fr_fr/page-daccueil/
Alimentation (Archive)
Liens utiles
- Lien vers le Geslab
- Lien vers le tutoriel " Main Exiii avec 2 capteurs musculaires + rotation du pouce" sur le site My Human Kit
- Lien vers le tutoriel "HACKberry main droite" sur le site de My Human Kit
- Lien vers la page du projet sur le site de My Human Kit
Emboiture DIY
Ce projet a été réalisé dans le cadre du Fabrikarium à Bombay et documenté en anglais sur le site Hackaday https://hackaday.io/project/51171-diy-prosthetic-socket