Différences entre versions de « Projets:Roboto »
| Ligne 35 : | Ligne 35 : | ||
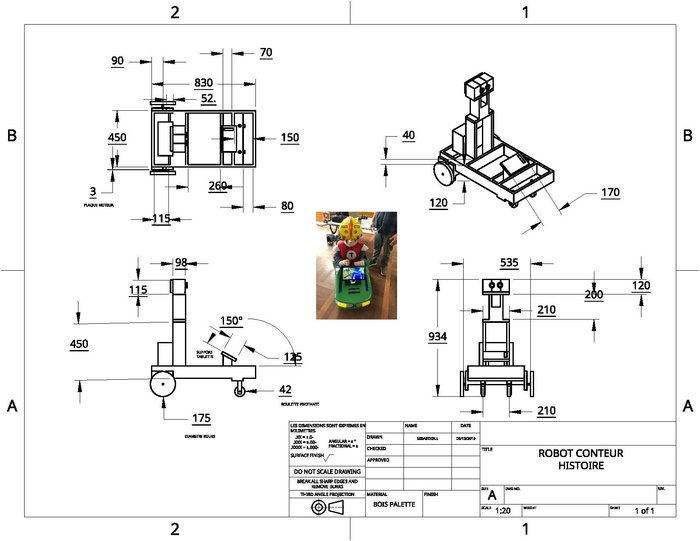
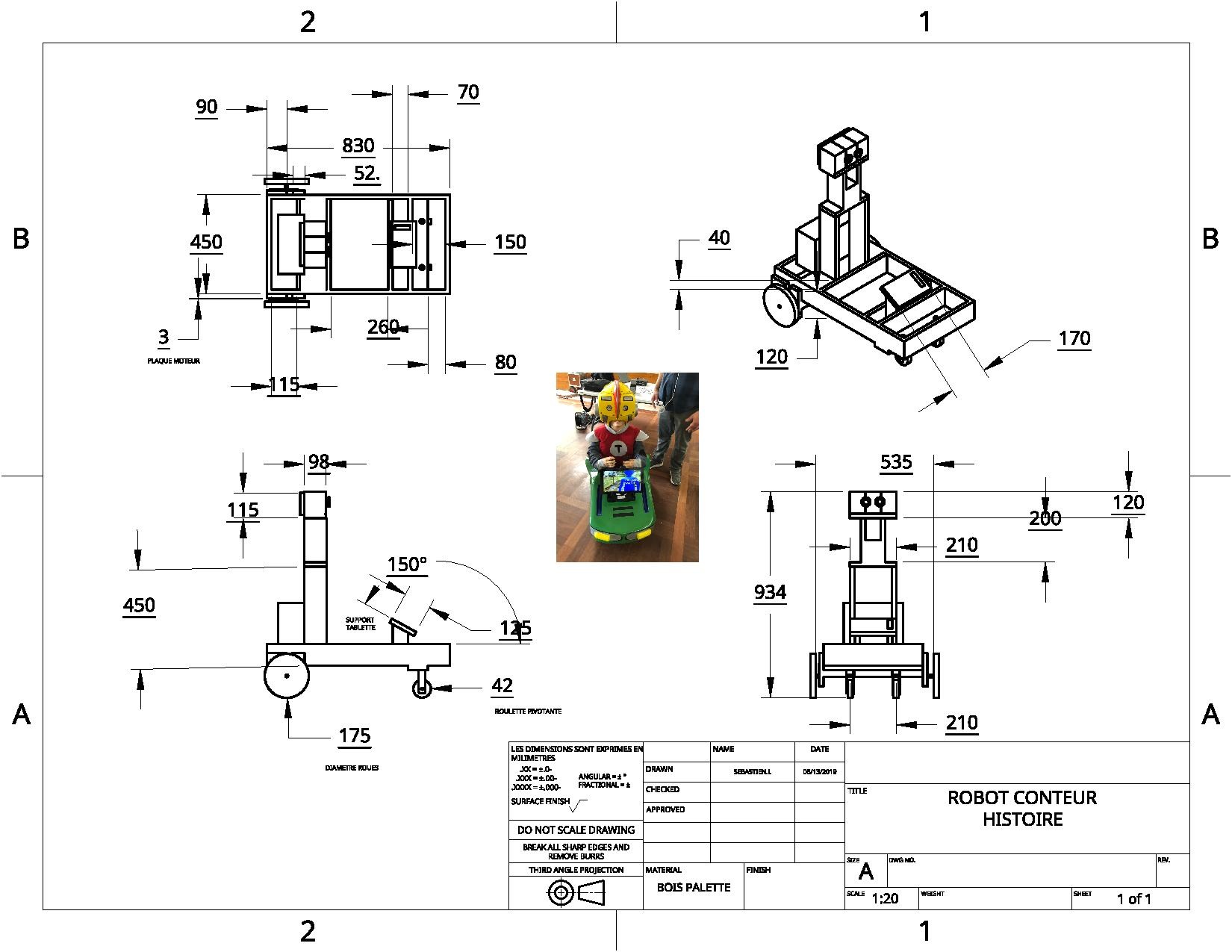
dimension du châssis | dimension du châssis | ||
[[File:robot plan de réalisation.pdf|left|700px]] | [[File:robot plan de réalisation.pdf|left|700px]] | ||
| − | + | [[File:robot plan de réalisation.pdf|robot plan de réalisation.pdf]] | |
{{ :arduino:capture_robot.png?200 |}} | {{ :arduino:capture_robot.png?200 |}} | ||
Version du 27 juin 2019 à 13:35
Description du projet
Projet de robot sur roulette télécommandé en bluetooth.
Liens utiles
- Page du projet sur le GesLab
- Canal de discussion du projet sur Framateam
- Documentation finale du projet
- Dépôt GitHub du projet
Cahier des charges
Analyse de l'existant
Equipe (Porteur de projet et contributeurs)
- Porteur de projet
- Contributeurs
- Animateur (coordinateur du projet)
- Fabmanager référent
- Delphine Bézier (delphine@myhumankit.org)
- Responsable de documentation
Matériel nécessaire
matériel Robot conteur

bois de palette récupération

dimension du châssis
{kind=link}
plaque aluminium support moteur
Robotchorus:cotes plaque moteur.jpg?200 fichier svg: Robotchorus:plaque-robot.zip
{kind=link}
roues robot
[[1]]
Robotchorus:roue robot.png?200
{kind=link}
entretoise roues robot
[[2]] Robotchorus:entretoise roues robot.png?200
{kind=link}
vises et boulonnerie
a déterminer suivant la construction et l'épaisseur du bois
batterie 12volt 12AH
Robotchorus:batterie 12v 12ah.jpg?200 <note important>important</note> a la dimension pour l'emplacement
{kind=link}
chargeur batterie 12volt
a prévoir
2 led ring12
<note fichier 3d disponible plus bas>fichier 3d disponible plus bas</note> fichier 3d disponible plus bas Robotchorus:neopixel rond.jpg?200 sert pour les yeux [[3]]
{kind=link}
interrupteur
pour le boitier 3d et pour le boitier électrique (pas de consommation inutile) [[4]] Robotchorus:interupteur robot boitier.jpg?200
{kind=link}
[[5]]
Robotchorus:interupteur robot boitier electrique.jpg?200
{kind=link}
moteur a démultiplication
description :
Takanawa motoréducteur 555 métallique 12v - 24v motoréducteur à courant continu
spécification :
modèle dcmotor RS- 555 tension appropriée 12v-24v vitesse 10-20-40-80 tr / min
courant de charge 2.5a
Vitesse à vide DC12V 3000-3500r / min dc la 7000-8000r / min
grandeur diamètre : 37 mm
longueur: 65 mm poids 502g longueur de l'arbre 16mm
traits :
- Haute vitesse , couple élevé , faible consommation d'énergie , à faible bruit la structure -simple machine , facile d'entretien , longue durée de vie . - Large utilisé pour la puissance de rideau de propulsion électrique , fours électriques , popper , réservoir de modèle -REDUCER a la structure simple , une installation pratique , l'alimentation à haute efficacité et un fonctionnement fiable .
https:/www.banggood.com/fr/TAKANAWA-555-Metal-Gear-Motor-12V-24V-DC-Gear-Motor-p-995307.html?rmmds=myorder&cur_warehouse=CN
Robotchorus:dimension moteur.png?200
Robotchorus:moteur-takanawa2.jpg?400
{kind=link}
{kind=link}
carte arduino uno
Robotchorus:arduino uno.jpg?200
{kind=link}
carte arduino nano
Robotchorus:arduino-nano-microprocessor.jpg?200
{kind=link}
Contoleur moteur
[[6]] Robotchorus:controleur moteur robot.png?200
{kind=link}
- note important>important</note> nunchuck**
manette de wii filaire Robotchorus:nunchuck.jpg?200 achat dans boutique achat vente ou récupération
{kind=link}
Adaptateur nunchuck
[[7]]
Robotchorus:adaptateur nunchuk.png?200
{kind=link}
hc05
(module bluethooth maitre exclave) Robotchorus:hc05-1.jpg?200Robotchorus:hc05 2.jpg?200
{kind=link}
{kind=link}
pile 9volt
{kind=link}
impression 3d:
(led et boitier commande)
<color #fff200>__conçue pour ne pas arracher le fil de la nunchuk__</color> Arduino:stl robot.zip Robotchorus:boitier-commande.png?200
{kind=link}
coffret électrique
<note important>important</note> bien vérifier les dimensions pour la batterie suivant l'emplacement
Découpe a l'intérieur pour faire de la place mais attention si vous voulez garder l’étanchéité Robotchorus:coffret electrique.png?200 disponible en magasin de bricolage
{kind=link}
<color #ff7f27>schéma branchement Arduino batterie motor shield</color> Robotchorus:sscanner 18062613060 1 .pdf